Para que o robô consiga ter um comportamento "inteligente", detetando e contornando obstáculos, há que dar-lhe a capacidade de "ver" o que o rodeia. São várias as formas de o conseguir - com detetores de infravermelhos, câmaras, sensores de toque...como o nosso kit low cost vinha equipado com um sensor de ultrassons SR04, foi esse o que o alunos usaram.


Assim, ao robô montado na sessão anterior, acrescentámos o sensor de ultrassons de acordo com o seguinte esquema:

Já aqui no blog tínhamos explorado o sensor de ultrassons no âmbito da programação gráfica. Os conceitos associados a este sensor encontram-se neste post, e por isso não nos alongaremos com mais considerações quanto ao princípio de funcionamento de um sensor deste tipo.
A programação deste sensor em C é facilitada com uma série de livrarias disponíveis que evitam a preocupação de enviar, detetar e analisar sinais, disponibilizando uma série de comandos que incluem todos esses passos. Usámos a Ultrasonic.h, e explorámo-la através dos exemplos dados.
A programação deste sensor em C é facilitada com uma série de livrarias disponíveis que evitam a preocupação de enviar, detetar e analisar sinais, disponibilizando uma série de comandos que incluem todos esses passos. Usámos a Ultrasonic.h, e explorámo-la através dos exemplos dados.
De forma a testar o funcionamento do sensor, usámos o programa seguinte que escreve na porta série a distância (em cm) a que um obstáculo é detetado pelo sensor:

Com o sensor a funcionar, houve que adaptar a marcha do robô de acordo com a distância lida pelo sensor. O objetivo era manter o robô a andar em frente caso o obstáculo estivesse a mais de 20 cm e alterar a sua trajetória caso o obstáculo estivesse mais perto que essa distância.
Nesta fase, os primeiros testes revelaram que o controlo da velocidade através das saídas PWM não é suficiente para as baixas velocidades pretendidas. Na verdade, para valores mais baixos registados nas saídas PWM, os motores não tinham força para se moverem. A opção passou por criar períodos de ponto morto de forma a diminuir a velocidade do robô.

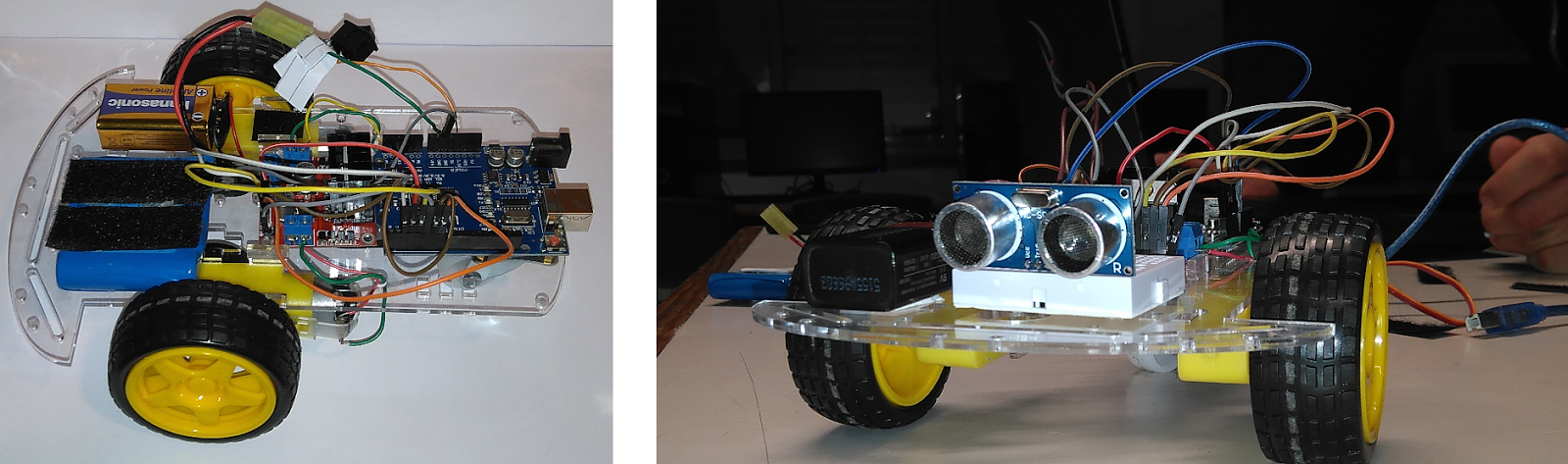
Como ilustração, deixamos o aspeto do robô nesta fase...
...e um vídeo com o robô em funcionamento (quando o vídeo foi feito, o robô ainda só parava na presença do obstáculo. Com o programa proposto, perante o obstáculo o robô anda para trás, gira e retoma a marcha):
Sem comentários:
Enviar um comentário